- 您現(xiàn)在的位置:買(mǎi)賣(mài)IC網(wǎng) > PDF目錄44968 > LSM330DL (STMICROELECTRONICS) SPECIALTY ANALOG CIRCUIT, PBGA28 PDF資料下載
參數(shù)資料
| 型號(hào): | LSM330DL |
| 廠商: | STMICROELECTRONICS |
| 元件分類(lèi): | 模擬信號(hào)調(diào)理 |
| 英文描述: | SPECIALTY ANALOG CIRCUIT, PBGA28 |
| 封裝: | 7.50 X 4.40 MM, 1.10 MM HEIGHT, GREEN, PLASTIC, LGA-28 |
| 文件頁(yè)數(shù): | 16/54頁(yè) |
| 文件大小: | 1064K |
| 代理商: | LSM330DL |
第1頁(yè)第2頁(yè)第3頁(yè)第4頁(yè)第5頁(yè)第6頁(yè)第7頁(yè)第8頁(yè)第9頁(yè)第10頁(yè)第11頁(yè)第12頁(yè)第13頁(yè)第14頁(yè)第15頁(yè)當(dāng)前第16頁(yè)第17頁(yè)第18頁(yè)第19頁(yè)第20頁(yè)第21頁(yè)第22頁(yè)第23頁(yè)第24頁(yè)第25頁(yè)第26頁(yè)第27頁(yè)第28頁(yè)第29頁(yè)第30頁(yè)第31頁(yè)第32頁(yè)第33頁(yè)第34頁(yè)第35頁(yè)第36頁(yè)第37頁(yè)第38頁(yè)第39頁(yè)第40頁(yè)第41頁(yè)第42頁(yè)第43頁(yè)第44頁(yè)第45頁(yè)第46頁(yè)第47頁(yè)第48頁(yè)第49頁(yè)第50頁(yè)第51頁(yè)第52頁(yè)第53頁(yè)第54頁(yè)
LSM330DL
Digital interfaces
Doc ID 022018 Rev 1
23/54
state. Data transfer only continues when the receiver is ready for another byte and releases
the data line. If a slave receiver doesn’t acknowledge the slave address (i.e. it is not able to
receive because it is performing some real-time function), the data line must be left HIGH by
the slave. The Master can then abort the transfer. A LOW to HIGH transition on the SDA line
while the SCL line is HIGH is defined as a STOP condition. Each data transfer must be
terminated by the generation of a STOP (SP) condition.
In order to read multiple bytes, it is necessary to assert the most significant bit of the sub-
address field. In other words, SUB(7) must be equal to 1 while SUB(6-0) represents the
address of first register to be read.
In the presented communication format MAK is Master acknowledge and NMAK is No
Master Acknowledge.
Default address
The SDO/SA0 pad can be used to modify the least significant bit of the device address. If
the SA0 pad is connected to a voltage supply, LSb is ‘1’ (ex. address 0011001b), else if the
SA0 pad is connected to ground, the LSb value is ‘0’ (ex address 0011000b).
The slave address is completed with a Read/Write bit. If the bit was ‘1’ (Read), a repeated
START (SR) condition will have to be issued after the two sub-address bytes. If the bit is ‘0’
(Write), the Master will transmit to the slave with the direction unchanged.
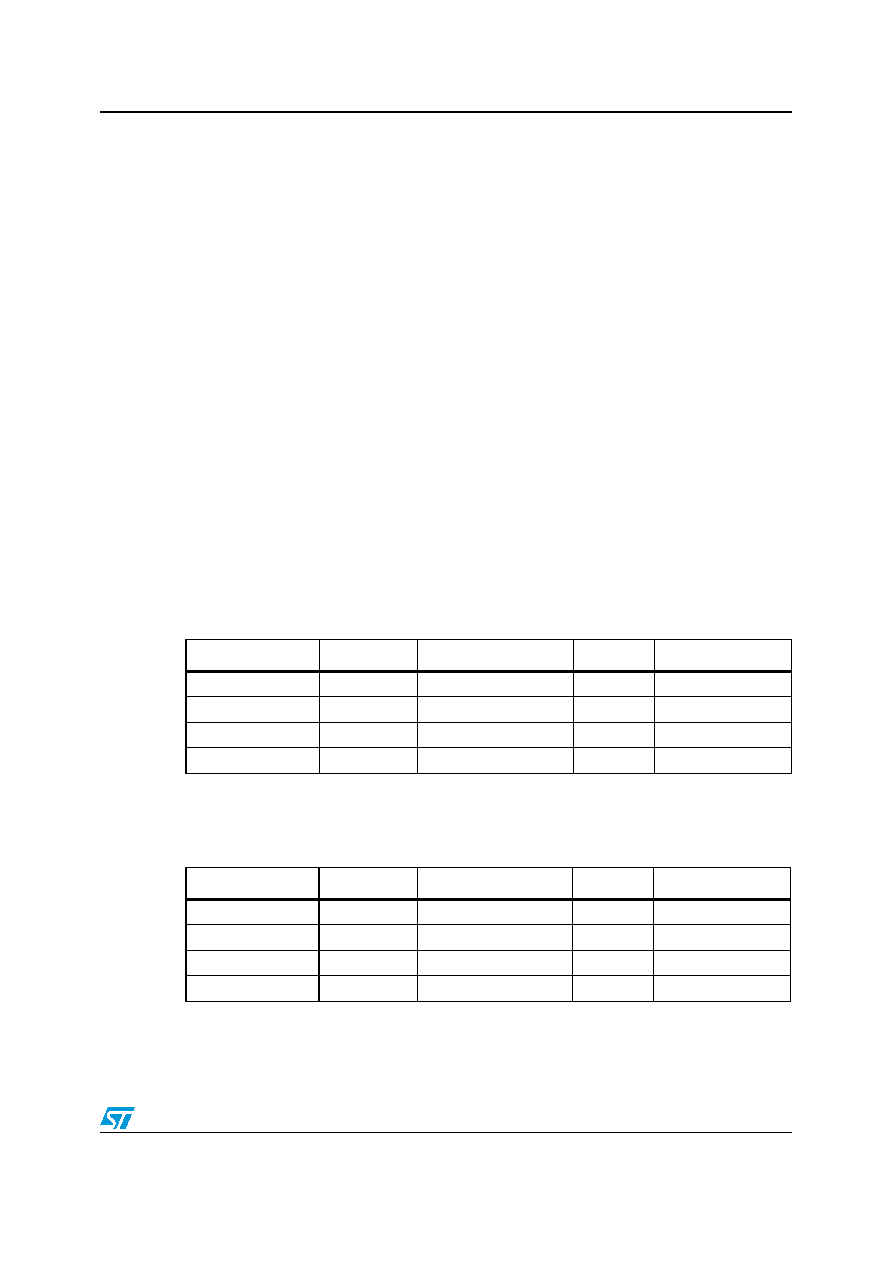
Table 16 and
Table 17 explain how the SAD+Read/Write bit pattern is composed, listing all the possible
configurations.
Linear acceleration address: the default (factory) 7-bit slave address is
001100xb
Angular rate sensor: the default (factory) 7-bit slave address is 110100xb
Table 16.
Linear acceleration SAD+Read/Write patterns
Command
SAD[6:1]
SAD[0] = SA0
R/W
SAD+R/W
Read
001100
0
1
00110001 (31h)
Write
001100
0
00110000 (30h)
Read
001100
1
00110011 (33h)
Write
001100
1
0
00110010 (32h)
Table 17.
Angular rate SAD+Read/Write patterns
Command
SAD[6:1]
SAD[0] = SA0
R/W
SAD+R/W
Read
110100
0
1
11010001 (D1h)
Write
110100
0
11010000 (D0h)
Read
110100
1
11010011 (D3h)
Write
110100
1
0
11010010 (D2h)
相關(guān)PDF資料 |
PDF描述 |
|---|---|
| LSN-0.75/16-D12HJ-C | 1-OUTPUT 12.8 W DC-DC REG PWR SUPPLY MODULE |
| LSN-1.8/16-D12HJ-C | 1-OUTPUT 28.8 W DC-DC REG PWR SUPPLY MODULE |
| LSN-1.2/16-D12HJ-C | 1-OUTPUT 19.2 W DC-DC REG PWR SUPPLY MODULE |
| LSN-2.5/16-D12HJ-C | 1-OUTPUT 40 W DC-DC REG PWR SUPPLY MODULE |
| LSN-1/16-D12HJ-C | 1-OUTPUT 16 W DC-DC REG PWR SUPPLY MODULE |
相關(guān)代理商/技術(shù)參數(shù) |
參數(shù)描述 |
|---|---|
| LSM330DLC | 功能描述:加速計(jì) - 板上安裝 iNEMO 3D SIP Module 2.4V to 3.6V IO 1.8V RoHS:否 制造商:Murata 傳感軸:Double 加速:12 g 靈敏度: 封裝 / 箱體: 輸出類(lèi)型:Analog 數(shù)字輸出 - 位數(shù):11 bit 電源電壓-最大:5.25 V 電源電壓-最小:4.75 V 電源電流:4 mA 最大工作溫度:+ 125 C 最小工作溫度:- 40 C |
| LSM330DLCTR | 功能描述:加速計(jì) - 板上安裝 iNEMO 3D SIP Module 2.4V to 3.6V IO 1.8V RoHS:否 制造商:Murata 傳感軸:Double 加速:12 g 靈敏度: 封裝 / 箱體: 輸出類(lèi)型:Analog 數(shù)字輸出 - 位數(shù):11 bit 電源電壓-最大:5.25 V 電源電壓-最小:4.75 V 電源電流:4 mA 最大工作溫度:+ 125 C 最小工作溫度:- 40 C |
| LSM330DLTR | 功能描述:加速計(jì) - 板上安裝 Linear Sensor Module 3D ACC 3D Gyro RoHS:否 制造商:Murata 傳感軸:Double 加速:12 g 靈敏度: 封裝 / 箱體: 輸出類(lèi)型:Analog 數(shù)字輸出 - 位數(shù):11 bit 電源電壓-最大:5.25 V 電源電壓-最小:4.75 V 電源電流:4 mA 最大工作溫度:+ 125 C 最小工作溫度:- 40 C |
| LSM330DTR | 制造商:STMicroelectronics 功能描述:INEMO INERTIAL MODULE: 3D ACCELEROMETER AND 3D GYROSCOPE |
| LSM330TR | 功能描述:加速計(jì) - 板上安裝 Inemo inertial module 3D accelerometer and 3D gyroscope RoHS:否 制造商:Murata 傳感軸:Double 加速:12 g 靈敏度: 封裝 / 箱體: 輸出類(lèi)型:Analog 數(shù)字輸出 - 位數(shù):11 bit 電源電壓-最大:5.25 V 電源電壓-最小:4.75 V 電源電流:4 mA 最大工作溫度:+ 125 C 最小工作溫度:- 40 C |
發(fā)布緊急采購(gòu),3分鐘左右您將得到回復(fù)。